3차원과 4차원 융합되기 시작! 회개하고 예수 그리스도의 피로 덮여 있어야 보호받습니다.
(유틸러티 안개는 1980년대부터 개발해온 기술이고 이제 본격 적용 시작. 아래 나사 문서의 발행일도 1993년 12월 1일로, 30년이 넘음)

안개는 실제 물리적 현실과 가상 현실 사이의 연속적인 다리 역할을 합니다. 안개는 보편적인 효과기일 뿐만 아니라 보편적인 센서이기도 합니다. 안개 환경의 모든 (실제) 물체는 압력, 힘, 지지의 매우 다양한 패턴으로 조작할 수 있으며, 측정, 분석, 무게 측정, 절단, 재조립, 또는 박테리아 크기의 조각으로 축소하여 재활용할 수 있습니다.
유틸러티 안개: 보편적인 물리적 물질
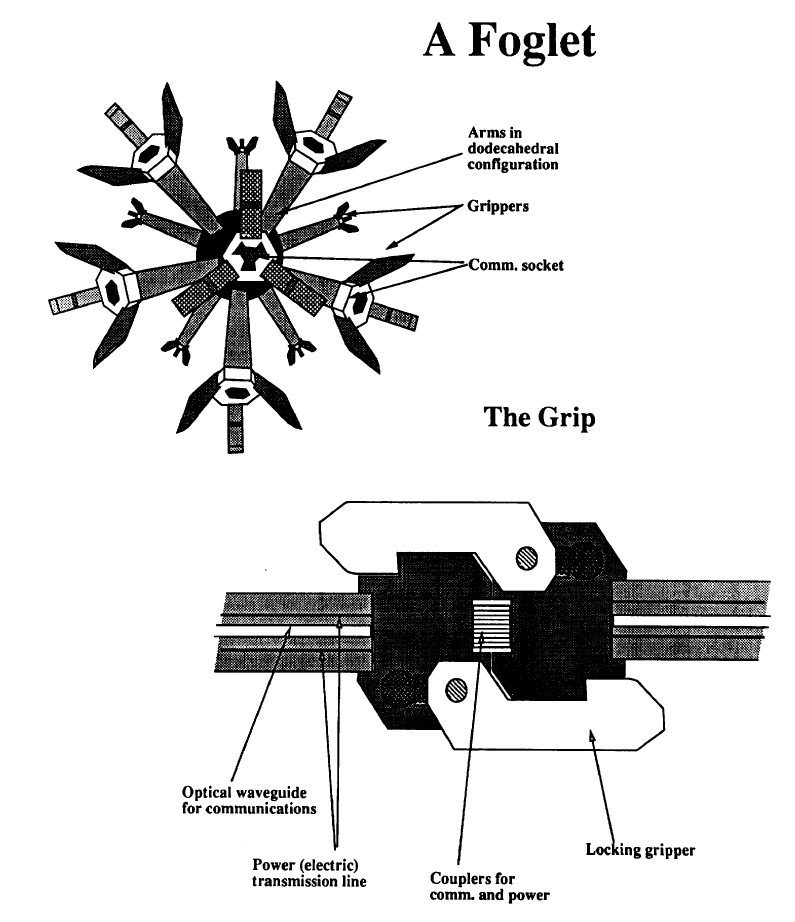
활성 다형성 물질(‘유틸리티 포그’)은 100 마이크론 로봇 셀(‘포글릿’)의 집합체로 설계할 수 있습니다. 이러한 로봇은 분자 나노기술의 기술로 제작할 수 있습니다. 처리 능력이 입방 마이크론당 1000MIPS인 컨트롤러와 입방 마이크론당 1밀리와트의 전력 밀도를 가진 전기 모터를 가정합니다. 유틸러티 포그는 대부분의 일상적인 재료를 시뮬레이션하고, 그 형태와 특성을 동적으로 변경할 수 있으며, 가상 현실과 텔레로보틱스[원격 로봇 조종]를 통합하기 위한 기판을 형성할 수 있어야 합니다.
미세한 로봇을 상상해 보세요. 인간 세포 크기 정도의 몸체와 12개의 팔이 사방으로 튀어나와 있습니다. 이러한 로봇이 한 통 가득 모여 있으면 팔을 격자 구조로 연결하여 ‘로봇 결정체’를 형성할 수 있습니다. 이제 사람, 가구 및 기타 물체가 있는 방은 여전히 대부분 빈 공기입니다. 로봇으로 공기를 완전히 채우세요.
적절한 프로그래밍을 통해 로봇은 물체 표면의 어떤 방향으로든 힘을 가할 수 있습니다. 로봇은 물체를 공중에 떠 있을 수 있도록 지지할 수 있습니다. 로봇은 의자가 받는 것과 동일한 압력을 바지 좌석에 가하여 사람을 지지할 수 있습니다. 로봇은 팔꿈치와 손가락 끝이 의자의 팔과 등에서 받는 것과 동일한 저항력을 발휘할 수 있습니다. 따라서 유틸러티 포그에서 실행되는 프로그램은 물체의 물리적 존재를 시뮬레이션할 수 있습니다.
유틸러티 포그는 두 가지 모드로 작동합니다: 첫째, 로봇이 세포처럼 행동하고 각 로봇이 특정 위치를 차지하여 주어진 물체에서 특정 기능을 수행하는 ‘일반’ 모드입니다. 두 번째 모드 또는 ‘포그’ 모드에서는 로봇이 TV 화면의 픽셀처럼 더 많이 작동합니다. 그런 다음 로봇은 당시 물체의 어느 부분을 표현하느냐에 따라 특성이 달라지는 로봇 패턴으로 형성됩니다. 그런 다음 CRT의 픽셀이 화면에서 움직이는 동안 개별 로봇이 움직이지 않고도 물체가 로봇 구름을 가로질러 이동할 수 있습니다.
공기를 시뮬레이션하는 유틸러티 안개는 미세해야 합니다. 단단한 플라스틱 유리에 던져진 느낌 없이 안개로 가득 찬 방을 걸을 수 있기를 원합니다. 또한 안개를 사용하면서 숨을 쉴 수 있기를 원합니다! 이를 위해 빈 공간을 대표하는 로봇은 로봇이 없을 때 공기가 무엇을 할지에 대한 유체 흐름 시뮬레이션을 지속적으로 실행합니다. 그런 다음 각 로봇은 이동하는 공기가 없는 동안 하는 일을 수행합니다.
공기가 단단한 기계 덩어리인데 어떻게 숨을 쉴 수 있을까요? 사실, 공기는 실제로 고체가 아닙니다. 포글렛[미세로봇 안개 생명체]은 실제 공기 부피의 약 I0_만 차지합니다(쉽게 움직이기 위해서는 많은 “자유롭게 움직일 수 있는 공간”이 필요합니다). 숨 쉴 수 있는 공기가 많이 남아 있습니다. 물리적으로 로봇을 들이마시는 한, 압력에 민감한 경계를 설정하여 한쪽의 공기 운동을 다른 쪽의 안개 운동으로 변환합니다. 심지어 안개가 공기 시뮬레이션을 폐까지 계속할 수도 있습니다.
왜 우리가 미세로봇들로 공기를 채우고 싶어도 마치 없는 것처럼 보이게 하려고 하는지 이해하려면 일반적인 그림에 비해 TV나 컴퓨터 화면의 장점을 고려해보십시오. 화면의 물체는 물리 법칙의 제약을 받지 않고 마음대로 나타났다가 사라질 수 있습니다. 전체 장면은 겉보기에는 한 지역에서 다른 지역으로 즉시 이동할 수 있습니다. 물리적 현실에서는 만들 수 없는 완전히 상상의 구조가 흔할 수 있습니다. 유틸리티 안개 환경에서는 상상할 수 있는 거의 모든 것에 실체적 현실이 적용될 수 있습니다.
대신, 동일한 겉보기 세계를 순수하게 감각적이지만 구별할 수 없는 버전의 가상 현실 기계를 만드는 것은 어떨까요? 안개는 실제 물리적 현실과 가상 현실 사이의 연속적인 다리 역할을 합니다. 안개는 보편적인 효과기일 뿐만 아니라 보편적인 센서이기도 합니다. 안개 환경의 모든 (실제) 물체는 압력, 힘, 지지의 매우 다양한 패턴으로 조작할 수 있으며, 측정, 분석, 무게 측정, 절단, 재조립, 또는 박테리아 크기의 조각으로 축소하여 재활용할 수 있습니다.
2 일반 속성 및 용도
안개는 개별 사람들의 감각과 근육의 확장을 형성할 뿐만 아니라 사회 전반에 걸쳐 일반화된 인프라로 작용할 수 있습니다. 안개 도시는 영구적인 콘크리트 건물, 아스팔트 도로, 자동차, 트럭, 버스가 필요하지 않습니다. 공원이나 숲처럼 보일 수도 있고, 인구가 충분히 변덕스럽다면 언젠가는 고대 로마, 다음 날은 에메랄드 시티처럼 보일 수도 있습니다.
장거리 에너지 및 정보 전파, 물리적 운송을 위한 전용 기계를 구축하는 것이 더 효율적일 것입니다. 지역 사용과 세계 타일 네트워크와의 인터페이스를 위해 안개는 이러한 모든 기능에 이상적입니다. 안개는 주거지, 의류, 전화, 컴퓨터, 자동차 등 다양한 용도로 사용할 수 있습니다. 필요할 때 갑자기 나타나거나 나중에 사라지는 거의 모든 일반적인 가정용 물체가 될 것입니다. 이러한 극단적인 다형성으로 인해 일정한 효율성을 얻게 되며, 텔레비전이나 컴퓨터 화면에서 보는 모든 이미지를 저장하는 데 필요한 하드 카피 사진의 수를 고려해야 합니다. 유틸러티 포그를 사용하면 하나의 ‘디스플레이’를 설치하고 모든 물리적 소유물을 디스크에 보관할 수 있습니다.
미래에 점점 더 중요해질 인프라의 또 다른 항목은 정보 처리입니다. 나노 기술은 우리가 정말 괴물 같은 컴퓨터를 만들 수 있게 해줄 것입니다. 각 포글렛[미세로봇 안개 생명체]은 비교적 작은 프로세서, 즉 현재 슈퍼컴퓨터의 성능을 가지고 있고, 약 1,600만 개에서 1세제곱인치의 포글렛이 있습니다. 포글렛이 다른 일을 하지 않을 때, 즉 현재 아무것도 통과하고 있지 않는 고체 물체 내부나 공기를 시뮬레이션할 때는 컴퓨팅 자원으로 사용할 수 있습니다.